使用触觉传感器实现触摸增强机器人抓取的框架
为了成功地与人类合作完成手动任务,机器人应该能够抓取和操纵各种物体而不会掉落或损坏它们。因此,最近机器人领域的研究工作集中在开发触觉传感器和控制器上,这些传感器和控制器可以为机器人提供触觉,并使它们的物体操纵能力更接近人类。
布里斯托尔机器人实验室(BRL)的灵巧机器人小组、比萨大学和印度理工学院的研究人员最近开发了一种触觉驱动系统,可以让机器人更轻柔、更有效地抓住各种物体。该系统在arXiv上预发表的一篇论文中进行了介绍,它结合了一种控制方案,该方案可实现力敏触摸与机器人手的每个指尖上都有一个光学触觉传感器。
“这项工作的动机源于BRL的灵巧机器人小组与比萨大学和IIT的研究人员之间的合作,”开发触觉系统的研究人员之一克里斯福特告诉TechXplore。“Pisa/IIT拥有基于人手的独特设计的机器人手(SoftHand)。我们希望将Pisa/IITSoftHand和BRLTacTip触觉传感器结合起来,因为这两种技术可以相互补充,因为它们的仿生性质。”
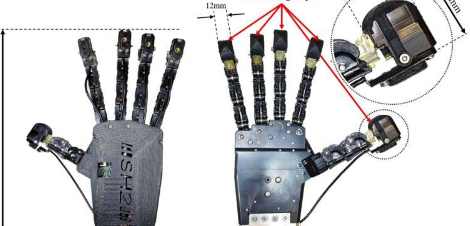
SoftHand是一种在形状和功能上都类似于人手的机械手。这只手最初是作为假肢工具开发的,可以像人手一样以相同的姿势协同抓握。
出于研究目的,福特和他的同事在SoftHand的每个指尖上集成了一个光学触觉传感器。他们使用了一种名为TacTip的传感器,它可以从内部结构类似于人类皮肤结构的3D打印触觉皮肤中提取信息。
福特说:“我们相信,这些特征的结合是机器人具有类似人类的灵活性和操纵能力的关键。”“我们在2021年发表的一篇论文中首次探讨了这种可能性,该论文将指尖传感器集成到Pisa/IITSoftHand的一个手指上并进行了基准测试。这项工作的自然延续是将传感器集成到所有手指上,并将手安装在一个机械臂使用来自指尖的触觉信息作为感官反馈来完成一些抓取和操纵任务。”
Ford及其同事最近工作的主要目标是进一步探索他们之前工作中引入的基于SoftHand的系统的潜力,但在其指尖上添加了TacTip传感器。将他们系统的这个更新版本与先进的控制框架相结合,他们希望重现类似人类、对力敏感且温和的抓握。
他们论文中介绍的新控制器通过测量SoftHand每个指尖上的柔软触觉皮肤的变形来工作。这种变形作为反馈信号,控制器使用该信号来调整手施加到其抓握物体上的力。
“与控制电机电流等更传统的抓取控制方法相比,这是独一无二的,当应用于具有‘软’结构的抓取器(如SoftHand)时,这种方法可能不准确,”福特解释说。“控制器的另一个独特功能是它使用来自5个高分辨率光学触觉传感器的反馈。光学触觉传感器使用摄像头来监控触觉皮肤的变化,并且由于它们捕获的大量触觉信息而非常有用更高的分辨率,因为图像的每个像素都是一个包含触觉信息的节点。对于1080p分辨率的触觉图像,这相当于超过200万个触觉节点。”
同时使用多个光学传感器通常需要大量的计算能力,因为一台计算机需要同时从不同的相机捕获高分辨率图像,以合理的速度收集触觉信息。为了减少与其系统相关的计算负荷,福特和他的同事开发了一个并行处理硬件“大脑”,可以同时从多个传感器收集图像。这极大地改善了他们的抓取控制器的反应时间,使其能够实现类似人类的性能。
“这项工作的结果表明,我们可以从多个指尖获取接近人类触觉的复杂触觉信息,并将其整合为一个简单的反馈信号,可用于成功地对各种物体进行稳定、轻柔的抓握,无论几何形状和刚度,而不需要复杂的调整,”福特说。“另一项成就是开发了用于同时捕获和处理来自多个高分辨率传感器的触觉数据的硬件‘大脑’。”
多个传感器的集成显着提高了研究人员基于SoftHand的机器人系统的触觉和传感能力。通过将其与并行处理硬件和精密控制器相结合,该团队还提高了以适当方式抓取不同类型物体的能力,并且不会出现与传感器数据处理相关的不良延迟。
“我们希望捕获尽可能多的触觉信息,因此必须以尽可能高的分辨率捕获数据,但是这很快就会变成过程密集型,特别是当您开始将多个传感器引入系统时,”福特说。“在多指手上使用光学触觉传感器时,拥有一个可扩展的、基于硬件的解决方案可以帮助我们解决这个问题。”
未来,由这组研究人员创建的新型触觉驱动机器人系统可以集成到类人机器人上,使它们能够处理易碎或可变形的物体,同时与人类合作完成不同的任务。尽管Ford和他的同事到目前为止主要是在需要轻柔抓取物体的任务上测试他们的系统,但它很快也可以应用于其他抓取和操纵场景。
“我们可以从这些传感器捕获的触觉数据的分辨率接近人类触觉分辨率,因此我们相信我们可以从触觉图像中提取更多信息,这将允许更复杂的操作任务,”福特补充道。
“因此,我们目前正在开发一些更复杂的方法来解决抓握的整体力量,并更准确地深入了解每个指尖接触的性质。我们希望最大限度地发挥这些传感器的潜力与拟人手的结合将导致机器人具有与人类相当的灵巧能力。”
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。