工程师设计一个系统来生产高效的水上机器人
水下结构可以像鱼一样动态改变其形状,比传统的刚性船体更有效地推动水。但是,构建可变形的装置,既能改变其体型曲线,又能保持光滑的轮廓,是一个漫长而困难的过程。例如,麻省理工学院的RoboTuna由大约3个不同的部件组成,花了大约两年的时间来设计和建造。
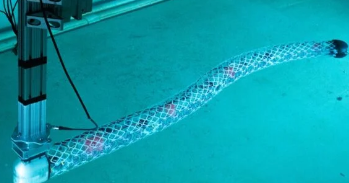
现在,麻省理工学院的研究人员和他们的同事 - 包括来自原始RoboTuna团队的研究人员 - 提出了一种构建可变形水下机器人的创新方法,使用简单的重复子结构而不是独特的组件。该团队以两种不同的示例配置展示了新系统,一种像鳗鱼,另一种像翅膀一样的水翼。然而,研究人员说,该原理本身允许形式和规模几乎无限的变化。
这项工作今天发表在《软机器人》杂志上,麻省理工学院研究助理Alfonso Parra Rubio,教授Michael Triantafyllou和Neil Gershenfeld以及其他六人发表了一篇论文。
用于海洋应用的软机器人的现有方法通常是在小尺度上制造的,而许多有用的实际应用需要米级的设备。研究人员提出的新模块化系统可以很容易地扩展到这样的尺寸甚至更高,而不需要扩展当前系统所需的那种重组和重新设计。
“可扩展性对我们来说是一个强项,”Parra Rubio说。他说,鉴于构成其系统的称为体素的晶格状部件的低密度和高刚度,“我们有更多的空间来保持规模”,而目前使用的大多数技术“依赖于面临严重问题的高密度材料”转向更大的尺寸。
该团队的实验性概念验证设备中的单个体素大多是中空结构,由铸造塑料件组成,具有复杂形状的狭窄支柱。盒子状的形状在一个方向上是承重的,但在另一个方向上是柔软的,这是一种不寻常的组合,通过混合不同比例的刚性和柔性部件来实现。
“对待软机器人与硬机器人是一种错误的二分法,”Parra Rubio说。“这是介于两者之间的东西,一种构建事物的新方法。麻省理工学院比特和原子中心负责人Gershenfeld补充说:“这是将两者的最佳元素结合在一起的第三种方式。
“车身表面的平滑柔韧性使我们能够实施流量控制,可以减少阻力并提高推进效率,从而节省大量燃料,”Triantafyllou说,他是Henry L.和Grace Doherty海洋科学与工程教授,也是RoboTuna团队的一员。
“以前有很多类似蛇的机器人,”Gershenfeld说。“但它们通常由定制组件制成,而不是这些可扩展的简单构建块。
例如,帕拉·卢比奥(Parra Rubio)说,宇航局建造的类似蛇的机器人由数千个独特的部件组成,而对于这个群体的蛇,“我们显示大约有60个部件。他说,与设计和建造麻省理工学院机器人金枪鱼的两年时间相比,该设备在大约两天内组装完成。
他们展示的另一个装置是类似机翼的形状或水翼,由相同的体素阵列组成,但能够改变其轮廓形状,从而控制机翼的升阻比和其他特性。这种机翼状形状可用于多种目的,从从波浪发电到帮助提高船体效率 - 这是一个迫切的需求,因为航运是碳排放的重要来源。
与蛇不同,翅膀的形状覆盖着一系列鳞片状的重叠瓷砖,旨在相互压压以保持防水密封,即使翅膀改变其曲率。一种可能的应用可能是在船体轮廓上添加某种内容,可以减少阻力诱导涡流的形成,从而提高其整体效率,该团队正在与航运业的合作者一起探索这种可能性。
最终,这个概念可能会应用于类似鲸鱼的潜水器,利用其可变形的身体形状来产生推进力。这种飞行器可以通过停留在地表以下来躲避恶劣天气,但没有传统推进的噪音和湍流。该概念也可以应用于其他船只的部件,例如赛艇,其中龙骨或方向舵可以在转弯时轻轻弯曲而不是保持笔直可以提供额外的优势。“而不是僵硬或只是有襟翼,如果你真的能像鱼一样弯曲,你可以更有效地绕弯,”Gershenfeld说。
研究团队包括中国西湖大学的范迪霞;本杰明·珍妮特 SM '15, 博士 ' 20 离散晶格工业;麻省理工学院的何塞·德尔·阿吉拉·费兰迪斯、阿米拉·阿卜杜勒-拉赫曼和大卫·普雷斯;和希腊德谟克里托斯研究中心的菲利普斯·图洛穆西斯。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。