类脑智能机器人理论分析与系统应用
机器人已经成为衡量一个国家科技竞争力的重要指标。机器人系统在机械工程、控制和人工智能技术等领域取得了进步。然而,当前机器人系统的性能仍然存在局限性,无法满足越来越多的应用需求。为了解决这些问题,构建了类脑智能机器人系统。
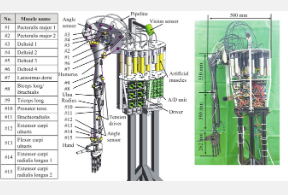
中国科学院自动化研究所复杂系统管理与控制国家重点实验室乔红教授团队对类脑机器人研究全链条前沿工作进行综述. 首先,他们介绍了视觉、决策、控制和身体结构的核心神经机制以及相应的类脑算法。其次,他们提出了软硬件系统集成。类脑机器人仿真平台集成了类脑算法在视觉、决策、运动控制等方面的功能,为不同领域的研究人员提供了高效的工具。硬件平台旨在模仿人类肌肉骨骼系统,
“类脑运动学习算法可以使用稀疏奖励来实现广义控制策略学习。通过这种方法,机器人经过简单的训练就可以完成一系列的操作。” “系统健壮性来自冗余,抗干扰可以提高系统可靠性。” “特殊的肌肉执行器提供非线性动力学和耦合反馈调制,可以减少控制输入和环境干扰的影响。” 他们描述了类脑智能机器人的优势。
此外,他们对下一代机器人技术的未来发展做出了假设。“下一代机器人技术可以通过大量的大脑启发算法和新颖的肌肉骨骼结构来开发。” “要加强和强调有机结构设计和硬件建设。” “我们希望这一代机器人能够为脑机接口控制提供灵感和借鉴。” 更多的时间和精力应该投入到类脑智能机器人的开发上。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。